Stiffness Method
约 1385 个字 3 张图片 预计阅读时间 9 分钟
以下三种方法用于计算机编程
Matrix Partitioning
用 \([\, ]_{fix}\) 表示已知位移或应力,用 \([\, ]_{?}\) 表示未知量,因此求解的步骤为:
- 求解: \(K_{22}d_{?} = F_{fix}-K_{21}d_{fix}\)
- 求解: \(F_? =K_{11}d_{fix}+K_{12}d_{?}\)
Note
如果此时已知量为 \(0\) (固定约束),我们可以删除对应行列的元素,比如说 \(d_{11}\) 位移为零,那么我们就可以删除第一行和第一列的元素,此时求解步骤为
这样方便求解
-
Advantages:
- 待求的方程比较少
- 满足特定约束
-
Disadvantages:
- 需要改变方程数量
- 不易编程
Row Substitution
假定约束条件给出 \(d_{i} = \delta\) ,则我们可以直接将其直接带入 Global Equation :
同时保留位移信息
Penalty Method
我们也可以将约束转换成一个比较大的惩罚项:
展开后:
一般取 \(BIG = 10^{15}(K_{ii})_{rep}\)
考虑两个弹簧的简单串联问题:
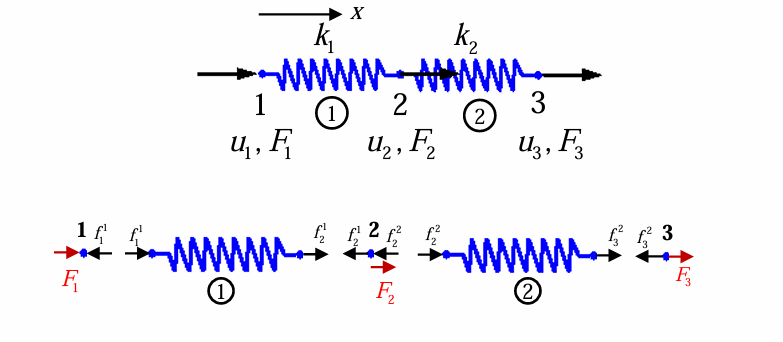
给出两个弹簧满足的平衡方程
考虑节点处的平衡条件可得装配后全局刚度矩阵:
Note
如果通过组合元素刚度来创建全局刚度矩阵,\(k_{22}\) 是由作用于节点 2 的直接刚度之和给出,这是兼容性条件所要求的。 \(k_{ij}\) 一般是负的(反作用力)或者是零(无作用效果)
Tip
- 位置 \(ii\) 中的项由所有在节点 \(i\) 处汇合的元素的直接刚度总和组成
- 位置 \(ij\) 项由连接节点 \(i\) 和 \(j\) 的所有元素与节点 \(i\) 和 \(j\) 有关的间接刚度综合构成
- 反作用力项添加负值
- 为不发生相互作用的节点组合添加一个零
\(N\) 个自由度会产生一个 \(N\times N\) 的刚度矩阵(方阵)
- (全局)刚度矩阵的 \(i\) 行与位移的积等于作用在系统第 \(i\) 个自由度的外力
- 刚度矩阵的第 \(j\) 列表示使 \(j\) 节点产生单位位移,其余节点不变所需要的力。
- 一般而言刚度矩阵为对称矩阵,对角线元素为正,矩阵为奇异矩阵
举个🌰
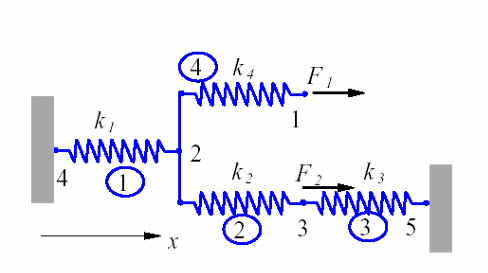
考虑如图系统,对于节点 \((1)\) 直接刚度为 \(k_{4}\) ,节点 \((1)\) 和节点 \((2)\) 之间的连接弹簧刚度为 \(k_{4}\) 其作用效果为反作用力;对于节点 \((2)\) ,直接相连的弹簧有 \(k_{1},k_{2},k_{4}\) ,节点 \((2)\) 与节点 \((4)\) 之间的连接弹簧刚度为 \(k_{1}\) ,节点 \((2)\) 和节点 \((3)\) 之间的连接刚度弹簧节点为 \(k_{2}\);对于节点 \((3)\) ,直接相连的弹簧有 \(k_{2},k_{3}\) ,除了节点 \((2)\) 外还与节点 \((5)\) 相连;对于节点 \((4)\) ,直接刚度为 \(k_{1}\) ,与节点 \((2)\) 相连;对于节点 \((5)\) ,直接刚度为 \(k_{3}\) ,与节点 \((3)\) 相连,所以全局刚度矩阵为
还有一种求法,其思想与上面的两个弹簧装配问题类似,对于弹簧 \(k_{l}\) ,其两端节点的位移分别为 \(u_{i},u_{j}\) (\(i,j,l\) 不一定要相等),则此时局部刚度矩阵
将其叠加就可得到全局装配矩阵
在这个例子中,对于弹簧 \({k}_{1}\) ,其作用两端节点位移为 \(u_{2},u_{4}\);对于弹簧 \({k}_{2}\) ,其作用两端节点位移为 \(u_{2},u_{3}\),对于弹簧 \({k}_{3}\) ,其作用两端节点位移为 \(u_{3},u_{5}\);对于弹簧 \(k_{4}\) ,其作用两端节点位移为 \(u_{1},u_{2}\),将其叠加可得全局刚度矩阵。
我们还能利用 Lagrange 方程或者能量最小原理得到上述方程。
由于刚度矩阵是一个奇异矩阵,也就是意味着其不可逆,\(\left\{ u \right\}\) 没有解。因此此时需要引入边界条件,从而将刚度矩阵变为一个可逆矩阵。
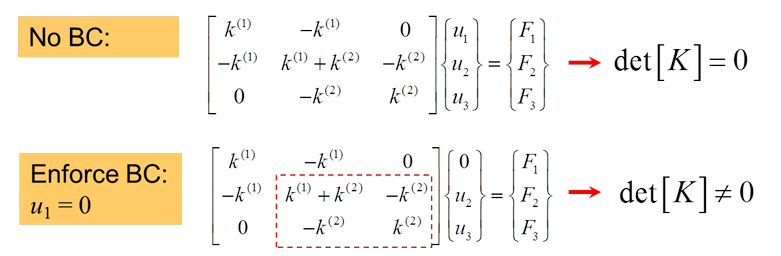
一个简单的例子就是,假定 \(u_{1}\) 为固定约束时,我们可以删去第一行和第一列的元素,剩下的元素构成一个刚度矩阵,如上图,变换后的刚度矩阵为
此时行列式 \(\det K = k_{1}k_{2}\) 变成一个可逆元素,系统存在唯一解。