连续系统振动 II
约 4169 个字 5 张图片 预计阅读时间 28 分钟
解的定性性质
我们来讨论振动问题的一些解的定性性质。
以杆为例,第一个定性性质是频率是离散无重复的即 \(0\le \omega_{1 }\le \omega_{2}\leq\dots\)
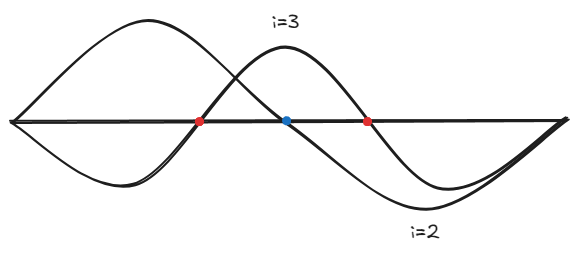
第二个定性性质是节点的交错性,他分为三种:
- 杆的两个相邻位移振型节点 \(\varphi_{i},\varphi_{i+1}\) 相互交错
- 杆的两个相邻转角 \(\theta_{i},\theta_{i+1}\) 节点相互交错
- 同阶转角 \(\theta_{i}\) 与位移 \(\varphi_{i}\) 相互交错
所谓交错性可以按照下图理解(不考虑两条曲线相交的节点):可以看到 \(\mathrm{i} \,=2\) 的节点(蓝色)在 \(\mathrm{i} \, = 3\) 节点 (红色) 之间,也就是说,相邻振型(转角)的节点必须是交错排序(左边和右边节点必须是另一条曲线的节点)
第三个定性性质是所有振型只有两个独立振型,所谓独立振型是指频率与振型相互独立,这个比较难理解,做一个简单的证明
取 \((\omega_{i},\varphi_{i}),(\omega_{j},\varphi_{j})\),带入杆的振动方程中得
\[
\begin{align}
\frac{d }{d x } \left[ E(x)A(x) \frac{d \varphi_{i}(x) }{d x } \right]= \omega^{2}_{i} \rho(x)A(x)\varphi_{i}(x) \tag{1} \\
\frac{d }{d x } \left[ E(x)A(x) \frac{d \varphi_{j}(x) }{d x } \right]= \omega^{2}_{j} \rho(x)A(x)\varphi_{j}(x)\tag{2}
\end{align}
\]
\((2)\) 式乘上 \(\omega_{i}^{2} \varphi_{i}(x)\) 后与 \((1)\) 相减得
\[
\frac{d }{d x } \left[ E(x)A(x) \frac{d \varphi_{i}(x) }{d x } \right]-\frac{d }{d x } \left[ E(x)A(x) \frac{d \varphi_{j}(x) }{d x } \right]\varphi_{i}(x) \omega_{i}^{2} = 0
\]
因为 \(\omega_{i} ,\omega_{j},\varphi_{i}(x),\varphi_{j}(x)\) 是已知的,所以我们总是可以用这四个已知量表示 \(E(x)A(x)\) ,同样的,我们也可以表示出 \(\rho(x)A(x)\) 。而对于剩下的频率与振型函数,总要满足上述关系时,也就是说剩下的频率与振型函数总是与上述四个已知量有关。这只是一个非常简单的结论说明,暂时不能用于实际中。
我们给出梁的振动解的定性问题
第一个定性性质:频率是离散无重复。
第二个定性性质:节点交错性
- 梁的相邻两个 \(\varphi(x) \text{ or }\theta(x)\text{ or }M(x)\text{ or }Q(x)\) 的节点是相互交错的
- 同阶 \(\varphi_{i},\theta_{i} (\theta_{i},M_{i})(Q_{i},\theta_{i})\) 相互交错。
更多内容参见 结构力学中的定性理论
弹性体振动的近似解问题
Note
黄老师说这章过一下就行,考试应该考简答题(?)
这章内容主要来源季文美的《机械振动》
集中质量法
我们可以将惯性相对地大而弹性极微弱地部件看作集中质量(刚体或质点),而把那些惯性相对的小而弹性极为显著的部件看作无质量的弹簧。对于均匀或近乎均匀的弹性体,我们保留或大致保留弹性体原有的弹性特性,而将质量集中到弹性体的若干个截面上。但是如何选取各个接种点以及如何配置各点的质量,才能使得所得结果比较接近于实际情况,这在很大程度上要靠经验或实验的启示,缺乏一般的理论指导,优点是做法简单,所得质量矩阵为对角阵,计算量小
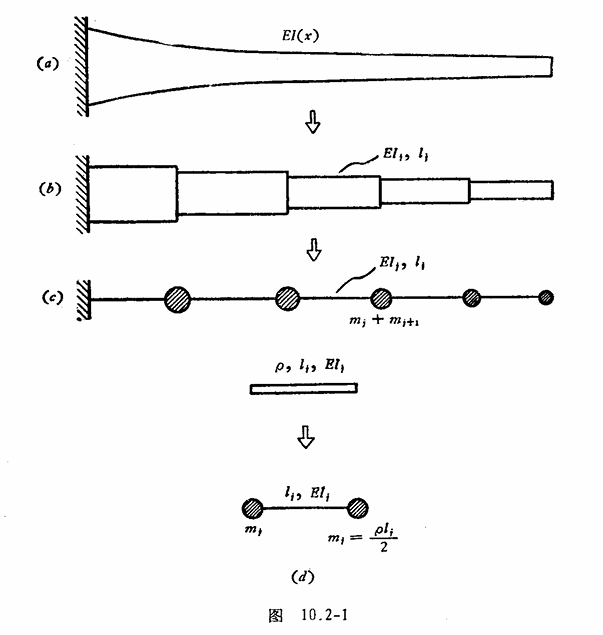
比如说如上变截面梁,我们先用若干个均匀梁端所组成的阶梯梁来替代变截面梁,然后保持各个梁端的弹性特性,将质量分别集中到梁的两端(取平分)。接下去就可以按多自由度系统的问题来处理了
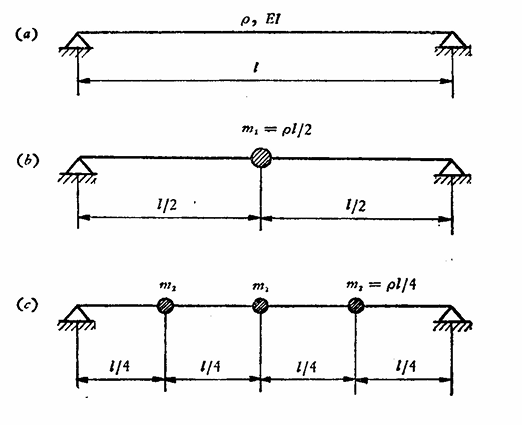
比如说均匀简支梁,取分成四段的模型,而前三阶固有频率的近似值为
\[
p_{1} = 9.860\alpha \quad p_{2}=39.2 \alpha \quad p_{3}=83.24\alpha \qquad \alpha \equiv \sqrt{ \frac{EI}{\rho l^{4}} }
\]
而对应的准确值
\[
p_{1}= 9.867 \alpha \quad p_{2} = 39.48 \alpha \quad p_{3} = 88.83 \alpha
\]
要求更高阶的固有频率就得取更多分段的模型
对于固支端、铰之或滑动支座端的情形,用集中质量法得到的固有频率值的误差于 \(\frac{1}{N^{4}}\) 成正比, \(N\) 为分段数,对于具有自由端的梁,误差则与 \(\frac{1}{N^{2}}\) 成正比。
假设振型法
在介绍假设振型法之前,先引入广义坐标近似法
广义坐标法将系统的惯性与弹性特性转化到一些振型上去,振型本身都是物理坐标的确定函数,在找出这些振型的运动规律以后,再用它们确定系统物理坐标的运动。主振型叠加法就是一种广义坐标法,对于弯曲振动,我们将其视作是一系列主振动叠加而成
\[
y(x,t) = \sum_{i} q_{i}(t)\sin \frac{ \text{i}\pi x}{l}
\]
实际上,我们所考察的频率范围是有限的,我们只需要取级数的有限项和就能准确地反映实际情况。各种广义坐标法近似法就是在这一基础上发展而来的。
在主振型叠加法中,我们采用的是系统的振型函数,但是我们不能总是找到这些振型函数的解析表达式,于是我们可考虑采用一些更适用的函数,这些函数不一定满足系统的运动微分方程,但是必须具备方程中的各阶导数,并满足适当的边界条件。做如下定义:
- 比较函数 :满足边界条件的函数
- 容许函数 : 满足几何边界条件
于是一维弹性体振动的解可近似表示为有限项的线性和
\[
y(x,t)=\sum^{n}_{i=1} \phi_{i}(x) q_{i}(t)
\]
\(\phi_{i}(x)\) 是这一边值问题的比较函数或容许函数,\(q_{i}(t)\) 为相应的广义坐标。\(\phi_{i}(x)\) 函数之间不一定具有正交性,所以广义坐标运动微分方程不再是相互独立,广义质量矩阵与广义刚度矩阵一般不是对角阵,而只是对称阵。
假设模态法就是一种广义坐标的近似法,他用有限个假设模态振动的线性和来近似地描述弹性体的振动。
以梁的振动为例,因为梁的位移可表示为
\[
y(x,t) = \sum_{i=1}^{n} \phi_{i}(x)q_{i}(t)
\]
\(\phi_{i}(x)\) 为假设模态函数,一般是指定边值问题的容许函数。
动能:
\[
\begin{align}
T &= \frac{1}{2} \int_{0}^{l} \rho(x)\left[ \frac{\partial y}{\partial t}(x,t) \right]^{2} \, {\rm d}x \\
&=\frac{1}{2} \sum_{i}^{} \sum_{j}^{} q_{i}(t)q_{j}(t)\int_{0}^{l} \rho(x)\phi_{i}(x)\phi_{j}(x) \, {\rm d} x
\end{align}
\]
写成矩阵形式为
\[
T = \frac{1}{2} \dot{\mathbf{q}}^{T} \mathbf{M}\dot{\mathbf{q}}
\]
同样的势能也可以表示为
\[
U = \frac{1}{2} \sum_{i}^{} \sum_{i}^{} q_{i}(t)q_{j}(t) \int_{0}^{l} E(x)I(x) \phi_{i}''(x)\phi_{j}''(x)\, {\rm d}
\]
矩阵形式
\[
U = \frac{1}{2} \mathbf{q}^{T }\mathbf{K}\mathbf{q}
\]
其中 \(\mathbf{q}\) 为广义位移列阵 \(\dot{\mathbf{q}}\) 为广义速度列阵 \(\mathbf{M}\) 为广义质量矩阵 \(\mathbf{K}\) 为广义刚度矩阵,与之前不同,此时广义质量矩阵与广义刚度矩阵不为对角阵。
如果只考虑自由振动,Lagrange 方程给出
\[
\frac{d }{d t } \left( \frac{\partial T }{\partial \dot{q} _{i}} \right) - \frac{\partial T }{\partial q_{i} } +\frac{\partial U }{\partial q_{i} } =0
\]
带入可得
\[
\mathbf{M} \ddot{\mathbf{q}} + \mathbf{K} \mathbf{q} = 0
\]
同样设定主振型振动:
\[
\mathbf{q} = \mathbf{a} \sin (\omega t)
\]
代入得
\[
[\mathbf{K}-\lambda \mathbf{M}] \mathbf{a} = 0 \quad\lambda =\omega^{2}
\]
于是这个问题又归结于一个特征值的问题,不过此时求出的固有频率 \(\omega\) 是对原有连续系统的近似值。同样的,我们也可以证明正交关系:
\[
\mathbf{a}_{j}^{T} \mathbf{M} a_{i} = \begin{cases}
0 & i \neq j \\
M_{i} & i=j
\end{cases}\qquad\mathbf{a}_{j}^{T} \mathbf{K} a_{i} = \begin{cases}
0 & i \neq j \\
K_{i} & i=j
\end{cases}
\]
相对于原有的振型函数 \(X_{i}(x) = \sum_{j=1}^{n} a_{ji}\phi_{i}(x) = \mathbf{a}^{T}_{i} \Phi = \Phi^{T}a_{i}\) 由于质量矩阵满足
\[
\mathbf{M} = \int_{0}^{l} \rho(x) \Phi \Phi^{T} \, {\rm d} x
\]
所以
\[
\begin{align}
&\int_{0}^{l} \rho(x)X_{i}(x)X_{j}(x) \, {\rm d} x \\
&= \int_{0}^{l} \rho(x)\mathbf{a}_{i}^{T}\Phi \Phi^{T}\mathbf{a}_{i} \, {\rm d} x \\
&=\mathbf{a}_{i}^{T} \int_{0}^{l} \rho(x)\Phi \Phi^{T} \, {\rm d} x \ \mathbf{a}_{i} \\
&=\mathbf{a}_{i}^{T} \mathbf{M } \mathbf{a}_{i} = \begin{cases}
0 &i\neq j \\
M_{i} &i=j
\end{cases}
\end{align}
\]
模态综合法
这边做一个简要赘述:对于一个复杂结构的振动分析,我们可以将其转化成若干个较为简单的子结构,然后找到它们的假设模态,在对接面上保持位移协调以及内力协调条件,把子结构重新常被成总体结构,这样,我们就可以利用各个子结构的假设模态来综合总体结构的振动模态。
有限元法
有限元法把一个复杂结构(连续系统)抽象化为有限个元素在有限个节点处对接而成的组合结构,每个元素都是一个弹性体。元素的位移用结点位移插值函数表示,插值函数实质上就是一种假设模态。我们对每个元素取假设模态,由于元素数目通常取得非常大,所以假设模态取得非常简单,一般是多项式函数形式。但此时我们并不是取模态作为广义坐标,而是取结点位移作为系统的广义坐标,这时,各个元素的分布质量将按照一定的格式集中到各个结点上去。
以梁的弯曲振动为例
下图是长度为 \(l\) 的均匀梁段在常值结点力作用下的静挠曲线(暂时没考虑振动)
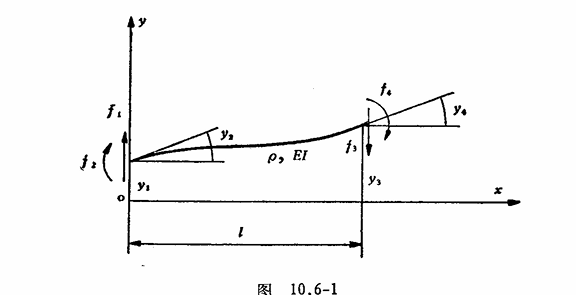
由于分布载荷为零,所以挠曲线满足
\[
\frac{d ^{4}y }{d x^{4} } = 0
\]
取解:
\[
y(x) = a_{0} +a_{1}x+a_{2}x^{2} +a_{3} x^{3} \equiv X(x) A \tag{1}
\]
我们取梁两端的挠度和转角作为广义坐标,即
\[
\mathbf{ y} = \begin{Bmatrix}
y(0) \\
y'(0 ) \\
y(l) \\
y'(l)
\end{Bmatrix}
\]
可以得到系数列阵满足
\[
A = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 \\
-\frac{3}{l^{2}} & -\frac{2}{l} & \frac{3}{l^{2}} & -\frac{1}{l} \\
\frac{2}{l^{3}} & \frac{1}{l^{2}} & -\frac{2}{l^{3}} & \frac{1}{l^{2}}
\end{bmatrix}\mathbf{y} \equiv C^{-1}\mathbf{y}
\]
所以 \((1)\) 又可以写成
\[
y(x) =X(x) A = X(x)C^{-1}\mathbf{y} \equiv \Phi(x) \mathbf{y}
\]
所以 \(\Phi(x)\) 也就是梁元素在常值结点力作用下,梁挠曲线的静模态函数,满足
\[
\Phi(x)=\left\{\begin{align}
&\phi_{1}(x) = 1- 3\left( \frac{x}{l} \right) ^{2}+2\left( \frac{x}{l} \right) ^{3} \\
& \frac{\phi_{2}(x)}{l} = \frac{x}{l}\left( 1-\frac{x}{l} \right)^{2} \\
&\phi_{3}(x) = 3 \left( \frac{x}{l} \right) ^{2} -2 \left( \frac{x}{l} \right) ^{3} \\
& \frac{\phi_{4}(x)}{l} = \left( \frac{x}{l} \right) ^{2}\left( \frac{x}{l} -1\right)
\end{align}\right.\tag{2}
\]
现在考虑梁的弯曲振动,如果我们仍用 \(\mathbf{y}\) 描述梁的广义坐标,那么 \(\mathbf{y}\) 显然是时间的函数,那么挠曲线就将不仅是空间上的函数,而且是时间上的函数,我们仍能取相同形式
\[
y(x,t) = \Phi(x)\mathbf{y}(t)
\]
\(\Phi(x)\) 仍满足式子 \((2)\) ,同时 \(\Phi(x)\) 满足
\[
\begin{align}
&\frac{\partial^{2}y }{\partial x^{2} } (x,t)= \Phi''(x)\mathbf{y} \\
& \frac{\partial y }{\partial t }(x,t) = \Phi (x) \dot{\mathbf{y}}
\end{align}
\]
所以梁的动能满足
\[
T= \frac{1}{2} \dot{\mathbf{y}}^{T}\mathbf{M} \dot{\mathbf{y}} \qquad \mathbf{M} = \int_{0}^{l} \rho \Phi^{T}\Phi \, {\rm d} x
\]
梁的势能满足
\[
U = \frac{1}{2} \mathbf{y}^{T} \mathbf{K}\mathbf{y} \qquad \mathbf{K} = \int_{0}^{l} EI \Phi''^{T}\Phi'' \, {\rm d}x
\]
根据式 \((2)\) 可以推导出质量矩阵和刚度矩阵的表达式
在梁弯曲的简化理论中,我们只需要考虑剪力与弯矩,在梁元素两端又四个对接力 \(f_{i}(i=1,2,,3,4)\) ,假定梁上作用分布载荷 \(f(x,t)\) ,我们来求对应的广义力,虚位移
\[
\delta y(x,t) = \sum_{i}^{} \phi_{i}(x)\delta y_{i}
\]
虚功:
\[
\delta W =\sum_{i}^{} f_{i}\delta y_{i}+\int_{0}^{l} f(x,t)\delta y(x,t) \, {\rm d}x = \sum_{_{i}}^{} \left\{ f_{i} + \int_{0}^{l} f(x,t)\phi_{i} \, {\rm d}x \right\}\delta y_{i}
\]
所以广义力
\[
Q_{i } =f_{i} + \int_{0}^{l} f(x,t)\phi_{i} \, {\rm d} x
\]
Lagrange 方程给出梁振动方程
\[
{\bf M} \ddot{\mathbf{y}} + \mathbf{K}\mathbf{y} = \mathbf{Q}
\]
\(\mathbf{Q}\equiv \left\{ Q_{i} \right\}\) 为广义力列阵。我们就可以求解 \(\mathbf{y}\) 进而给出梁振动的近似表达式。
加权残数法
对于一个弹性体振动问题,我们一般要求解两个函数:振型函数 \(\Phi(x)\) 以及时间函数 \(T(t)\) ,对于振型函数,我们一般需要求解以下方程
\[
\left[ E(x)A(x)\frac{{\rm{d}} ^{2} \Phi}{{\rm {d}} x^{2} } \right] -\omega^{2} \rho(x)A(x) \Phi = 0
\]
其中 \(\omega^{2}\) 表示频率。记将解带入方程后两端差为残数,显然对于精确解,残数应当为零。但是我们并不能总是给出精确解,考虑如下弱形式:
\[
\int_{0}^{l} \psi(x)R(\overset{ \sim }{ \Phi }(x)) \, {\rm d}x =0
\]
\[
R(\overset{ \sim }{ \Phi }(x),x) = \left[ E(x)A(x)\frac{{\rm{d}} ^{2} \overset{ \sim }{ \Phi }}{{\rm {d}} x^{2} } \right] -\omega^{2} \rho(x)A(x) \overset{ \sim }{ \Phi }
\]
其中 \(\psi(x)\) 为已知权函数,也就是我们退而求其次,要求其关于所在区域的加权平均值为零。满足上述加权平均值关系的解 \(\overset{ \sim }{ \Phi }(x)\) 称为近似解。所以对于我们需要求解的近似振型函数:
\[
R(\overset{ \sim }{ \Phi }(x)) = \sum_{ i=1}^{n} \alpha_{i} \overset{ \sim }{ \varphi }_{i}(x)
\]
一般而言, \(\overset{ \sim }{ \varphi }(x)\) 是我们设定的试函数(一般而言满足边界条件)。因此当我们设定好权函数 \(\psi(x)\) 后,我们的任务就剩下求解待定参数 \(\alpha_{i}\)。
对于 \(\psi(x)\) 我们一般有如下四种取法:
\[
\int_{0}^{l} \overset{ \sim }{ \varphi }_{i}(x)R\left[ \sum_{j=1}^{n} \alpha_{j}\overset{ \sim }{ \varphi }_{j}(x) ,x\right] \, {\rm d} x =0
\]
- 配点法,也称并置法,取 \(n\) 个点 \(x_{1},x_{2},\dots,x_{n}\) ,令残差在这些点上为零
\[
R\left[ \sum_{j=1}^{n} \alpha_{j}\overset{ \sim }{ \varphi }_{j}(x_{i}) ,x_{i}\right] =0
\]
显然取狄拉克函数 \(\delta(x-x_{i})\) 可为权函数。
- 子区域法:我们划分 \(n\) 个区域 \([l_{i-1},l_{i}]\) ,令残数在各个子区域的积分为零,即
\[
\int_{l_{i-1}}^{l_{i}}R\left[ \sum_{j=1}^{n} \alpha_{j}\overset{ \sim }{ \varphi }_{j}(x) ,x\right] \, {\rm d} x =0
\]
那么对应权函数满足
\[
\chi_{i} (x)= \left\{\begin{aligned} 1 & \quad x \in [l_{i-1},l_{i}]\\
0& \quad \text{otherwise }\end{aligned}\right.
\]
- 最小平方法:要求残数的平方值在全区间上的累积取最小值,以此确定权函数。即
\[
\int_{0}^{l} \frac{\partial R }{\partial \alpha_{i} } R\left[ \sum_{j=1}^{n}\alpha_{j }\overset{ \sim }{ \varphi }_{j}(x),x \right] \, {\rm d}x =0
\]
传递矩阵法
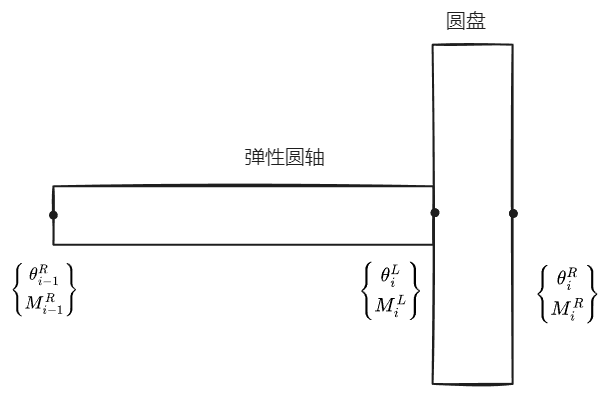
考虑多刚体盘的圆截面扭转振动,取上述单元体,记转角 \(\theta\) 为广义位移,扭矩 \(M\) 为广义力。
圆盘两侧满足
\[
\begin{align}
&\theta_{i}^{L} = \theta^{R}_{i} \\
&M^{R}_{i}-M^{L}_{i}= J_{i} \ddot{\theta}^{R}_{i} = -\omega^{2}J_{i}\theta_{i}^{R}
\end{align}
\]
\(J_{i}\) 为惯性矩,我们假定扭转运动为周期函数满足 \(\ddot{\theta_{i}} = -\omega^{2} \theta_{i},\omega\) 为频率,以矩阵形式写出就是
\[
\begin{Bmatrix}
\theta_{i}^{R} \\
M_{i}^{R}
\end{Bmatrix} = \begin{bmatrix}
1&0 \\
-\omega^{2} J_{i} & 1
\end{bmatrix}
\begin{Bmatrix}
\theta_{i}^{L} \\
M_{i}^{L}
\end{Bmatrix}
\]
对于弹性体,我们假定其惯性矩为零,则其运动满足
\[
M_{i}^{L} = M_{i-1}^{R}= k_{i}(\theta^{L}_{i}-\theta^{R}_{i-1})
\]
我们依旧给出矩阵形式
\[
\begin{Bmatrix}
\theta_{i}^{L} \\
M_{i}^{L}
\end{Bmatrix} = \begin{bmatrix}
1& 1/k_{i} \\
0 & 1
\end{bmatrix}
\begin{Bmatrix}
\theta_{i-1}^{R} \\
M_{i-1}^{R}
\end{Bmatrix}
\]
所以可以得出
\[
\begin{Bmatrix}
\theta_{i}^{R} \\
M_{i}^{R}
\end{Bmatrix} = \begin{bmatrix}
1&0 \\
-\omega^{2} J_{i} & 1
\end{bmatrix}
\begin{bmatrix}
1& 1/k_{i} \\
0 & 1
\end{bmatrix}
\begin{Bmatrix}
\theta_{i-1}^{R} \\
M_{i-1}^{R}
\end{Bmatrix}\triangleq S_{i}\begin{Bmatrix}
\theta_{i-1}^{R} \\
M_{i-1}^{R}
\end{Bmatrix}
\]
因此叠加就可得到
\[
\begin{Bmatrix}
\theta_{n}^{R} \\
M_{n}^{R}
\end{Bmatrix}= S_{n}S_{n-1}\dots S_{1} \begin{Bmatrix}
\theta_{0}^{R} \\
M_{0}^{R}
\end{Bmatrix} \triangleq \begin{bmatrix}
s_{11} & s_{12} \\
s_{21} & s_{22}
\end{bmatrix}
\begin{Bmatrix}
\theta_{0}^{R} \\
M_{0}^{R}
\end{Bmatrix}
\]
为了求解固有频率,我们需要根据边界条件,定出矩阵中某一元素 \(s_{ij}\) 为零。