Convolutional Networks
约 2864 个字 8 张图片 预计阅读时间 19 分钟
Components of a Convolutional Network
- Fully-Connected Layers
- Convolution Layers
- Activation Function
- Pooling Layers
- Normalization
Fully-Connected Layers
在全连接层中,神经元对于前一层中的所有激活数据是全部连接的,这个常规神经网络中一样。它们的激活可以先用矩阵乘法,再加上偏差。
对于高维感知数据,单纯的全连接层可能会变得不适用,假设我们有一个足够充分的照片数据集,数据集中是拥有标注的照片,每张照片具有百万级像素,这意味着网络的每次输入都有一百万个维度。 即使将隐藏层维度降低到1000,这个全连接层也将有\(10^6\times10^3=10^9\)个参数。 想要训练这个模型将不可实现,因为需要有大量的GPU、分布式优化训练的经验和超乎常人的耐心。在真实的系统中我们仍然需要数十亿个参数。 此外,拟合如此多的参数还需要收集大量的数据。
Convolution Layers
卷积层是构建卷积神经网络的核心层,它产生了网络中大部分的计算量。
一次卷积操作:
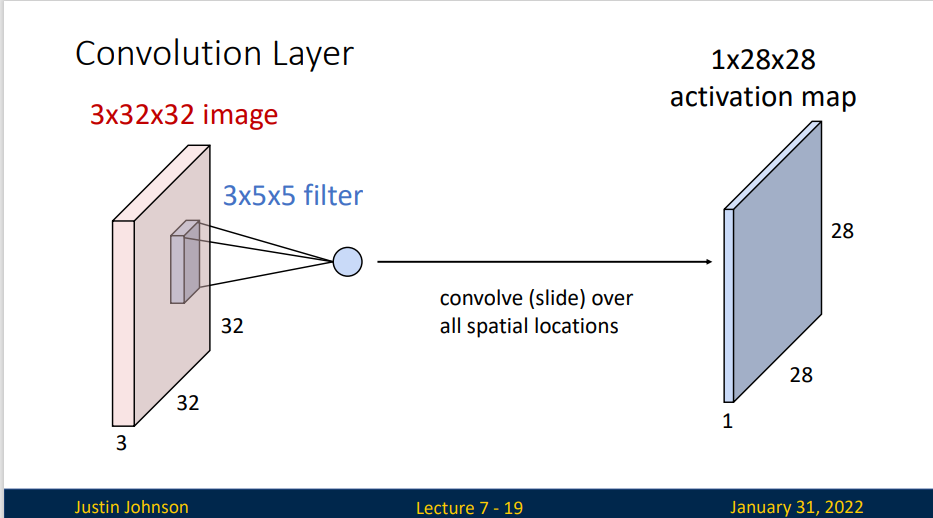
我们使用一个卷积核或过滤器,进行卷积操作,并且将输出结果组成一个特征图,这个过程是线性的,一个核就是一个模板,输出结果就是这块图像与模版的匹配程度
比如,我们选择了一个 \(3\times 5\times 5\) 过滤器,对图像数据操作后得到了一个\(1\times 28\times 28\)的激活映射图(activation map)(过滤器需要选取图像中的有效数据,我们并没有设置额外的边界条件,所以输出的结果的大小会减少) spatial dimensions: Input:W Filter:K Output:W-K+1
Filters always extend the full depth of the input volume.
事实上,一个卷积核往往是不够的,因此我们会选取多个卷积核,并且以多维张量形式表示.
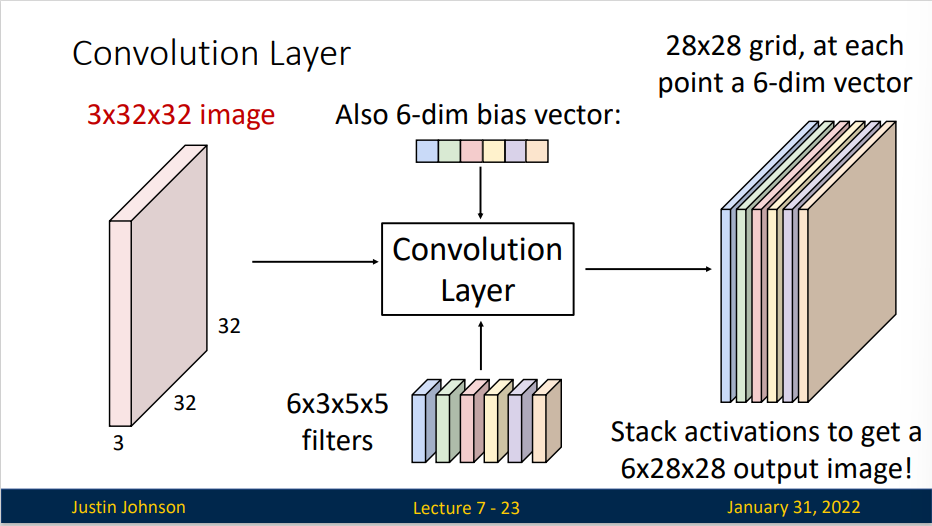
一个卷积层结构类似于上图,有六个卷积核,所以卷积核为一个四维张量,每个卷积核大小为 \(3\times5\times 5\)。于是一个 \(3\times32\times32\)的图片,经过大小为\(6\times 3\times5\times5\)的卷积核卷积,并加上一个6维的偏差向量(bias vector)得到六张特征图 \(6\times 28\times 28\)
但是单纯的多次卷积操作并不能得到更好的结果,因为实际上卷积是线性操作,多个卷积仍是线性网络,所以我们还需要加上激活函数,这样才能更好的学习。
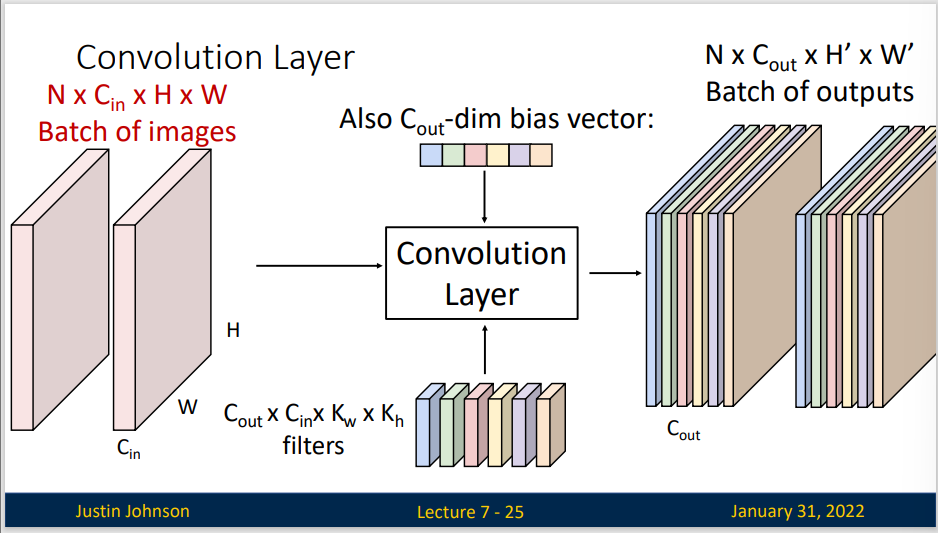
3个超参数控制着输出数据体的尺寸:深度(depth),步长(stride)和零填充(zero-padding)。下面是对它们的讨论:
- 首先,输出数据体的深度是一个超参数:它和使用的滤波器的数量一致,而每个滤波器在输入数据中寻找一些不同的东西。举例来说,如果第一个卷积层的输入是原始图像,那么在深度维度上的不同神经元将可能被不同方向的边界,或者是颜色斑点激活。我们将这些沿着深度方向排列、感受野相同的神经元集合称为深度列(depth column),也有人使用纤维(fiber)来称呼它们。
- 其次,在滑动滤波器的时候,必须指定步长。当步长为1,滤波器每次移动1个像素。当步长为2(或者不常用的3,或者更多,这些在实际中很少使用),滤波器滑动时每次移动2个像素。这个操作会让输出数据体在空间上变小。
- 有时候将输入数据体用0在边缘处进行填充是很方便的。这个零填充(zero-padding) 的尺寸是一个超参数。零填充有一个良好性质,即可以控制输出数据体的空间尺寸(最常用的是用来保持输入数据体在空间上的尺寸,这样输入和输出的宽高都相等)。
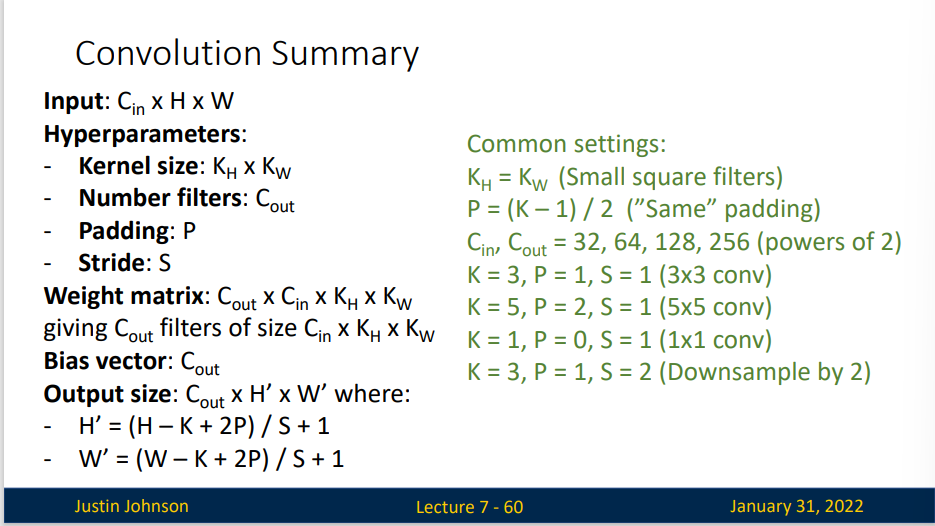
输出数据体在空间上的尺寸可以通过输入数据体尺寸(W),卷积层中神经元的感受野尺寸(F),步长(S)和零填充的数量(P)的函数来计算。
对于零填充,一般取零填充的值\(P=(F-1)/2\),这样就能保证输入核输出数据体有相同的空间尺寸。输出数据体的空间尺寸为\((W-F +2P)/S+1\)。
步长的限制:这些空间排列的超参数之间是相互限制的。这些超参数会影响着输出数据体的空间尺寸大小,而当其值不为整数时,也就是说神经元不能整齐对称地滑过输入数据体,这些超参数地设定就被认为是无效的。于是,这些超参数的设定就被认为是无效的,一个卷积神经网络库可能会报出一个错误,或者修改零填充值来让设置合理,或者修改输入数据体尺寸来让设置合理,或者其他什么措施。
- Receptive Fields
- For convolution with kernel size \(K\), each element in the output depends on a \(K\times K\) receptive field in the input.
- Each successive convolution adds \(K-1\) to the receptive field size With \(L\) layers the receptive field size is \(1+L*(K-1)\)
在处理图像这样的高维度输入时,让每个神经元都与前一层中的所有神经元进行全连接是不现实的。相反,我们让每个神经元只与输入数据的一个局部区域连接。该连接的空间大小叫做神经元的感受野(receptive field),它的尺寸是一个超参数(其实就是滤波器的空间尺寸)。在深度方向上,这个连接的大小总是和输入量的深度相等。需要再次强调的是,我们对待空间维度(宽和高)与深度维度是不同的:连接在空间(宽高)上是局部的,但是在深度上总是和输入数据的深度一致。
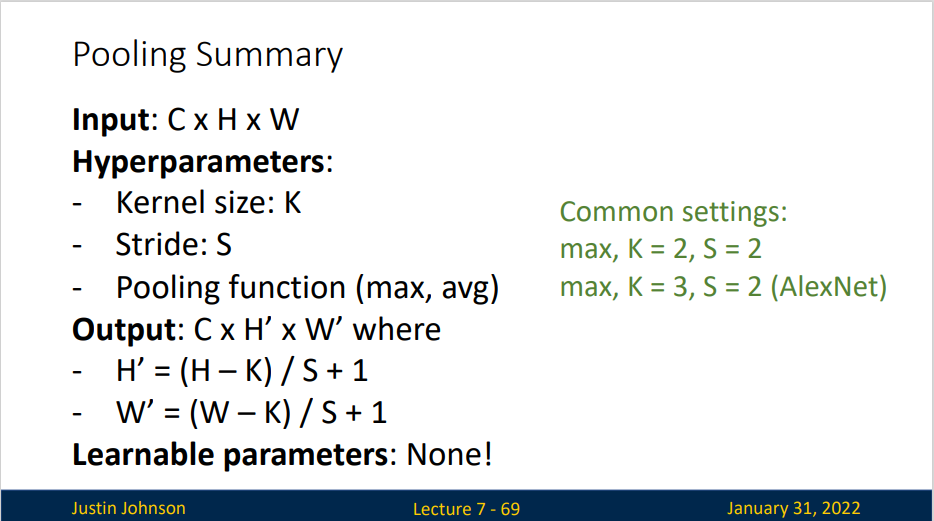
Pooling Layers
Another way to downsample
Hyperparameters:
- Kernel Size
- Stride
- Pooling function
通常,在连续的卷积层之间会周期性地插入一个汇聚层。它的作用是逐渐降低数据体的空间尺寸,这样的话就能减少网络中参数的数量,使得计算资源耗费变少,也能有效控制过拟合。汇聚层使用MAX操作,对输入数据体的每一个深度切片独立进行操作,改变它的空间尺寸。最常见的形式是汇聚层使用尺寸2x2的滤波器,以步长为2来对每个深度切片进行降采样,将其中75%的激活信息都丢掉。每个MAX操作是从4个数字中取最大值(也就是在深度切片中某个2x2的区域)。深度保持不变。
在实践中,最大汇聚层通常只有两种形式:一种是 \(F=3,S=2\) 也叫重叠汇聚(overlapping pooling),另一个更常用的是 \(F =2,S =2\) 。对更大感受野进行汇聚需要的汇聚尺寸也更大,而且往往对网络有破坏性。
普通汇聚(General Pooling):除了最大汇聚,汇聚单元还可以使用其他的函数,比如平均汇聚(average pooling)或L-2范式汇聚(L2-norm pooling)。平均汇聚历史上比较常用,但是现在已经很少使用了。因为实践证明,最大汇聚的效果比平均汇聚要好。
不使用汇聚层:很多人不喜欢汇聚操作,认为可以不使用它。比如在Striving for Simplicity: The All Convolutional Net一文中,提出使用一种只有重复的卷积层组成的结构,抛弃汇聚层。通过在卷积层中使用更大的步长来降低数据体的尺寸。有发现认为,在训练一个良好的生成模型时,弃用汇聚层也是很重要的。比如变化自编码器(VAEs:variational autoencoders)和生成性对抗网络(GANs:generative adversarial networks)。现在看起来,未来的卷积网络结构中,无汇聚层的结构不太可能扮演重要的角色。
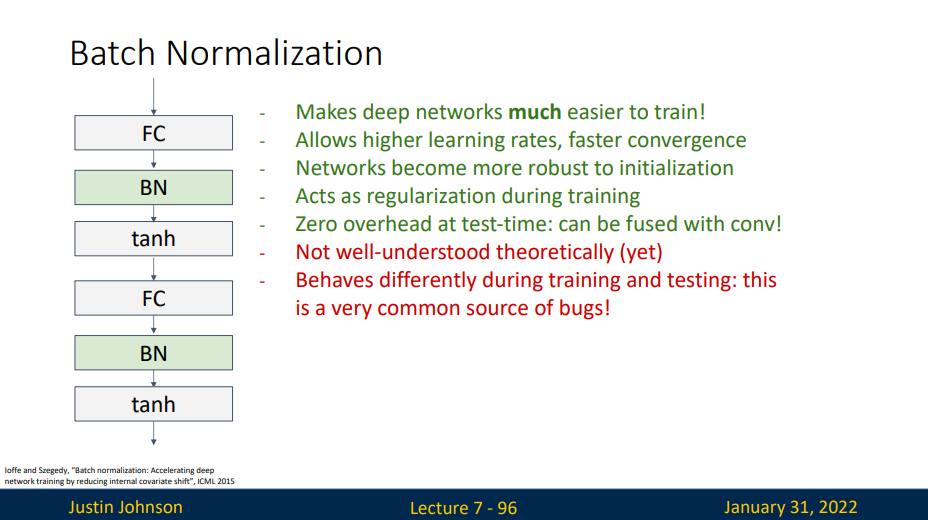
Batch Normalization
"Normalize" the outputs of a layer so they have zero mean and unit variance
We can normalize a batch of activations like this:
This is a differentiable function, so we can use it as an operator in our networks and backprop through it.
训练神经网络出现问题:
- 数据预处理的方式会对最终结果产生巨大影响。
- 对于典型的多层感知机或卷积神经网络,当我们训练时,中间层中的变量(例如,多层感知机中的仿射变换输出)可能具有更广的变化范围:不论是沿着从输入到输出的层,跨同一层中的单元,或是随着时间的推移,模型参数的随着训练更新变幻莫测。
- 更深层的网络很复杂,容易过拟合。
批量规范化(Batch Normalization)可应用于单个可选层,其原理如下:在每次训练迭代中,我们首先规范化输入,即通过减去其均值并除以其标准差,其中两者均基于当前小批量处理。 接下来,我们应用比例系数和比例偏移。
请注意,如果我们尝试使用大小为1的小批量应用批量规范化,我们将无法学到任何东西。 这是因为在减去均值之后,每个隐藏单元将为0。 所以,只有使用足够大的小批量,批量规范化这种方法才是有效且稳定的。 请注意,在应用批量规范化时,批量大小的选择可能比没有批量规范化时更重要。
批量规范化表达式:
其中 \(\gamma\) 称为拉伸参数, \(\beta\) 称为偏移参数,是需要与其他模型参数一起学习的参数
Per-channel mean, shape is D
Per-channel std, shape is D
有些时候会在方差估计值中添加一个小的常量 \(\varepsilon>0\),以确保我们永远不会尝试除以零,即使在经验方差估计值可能消失的情况下也是如此。
Normalized x, Shape is N x D
Problem: Esitmates depend on minibatch; can't do this at test-time
That is
(Similar for \(\sigma\)) During testing batchnorm becomes a linear operator! Can be fused with the previous fully-connected or cov layer
Convolutional Networks
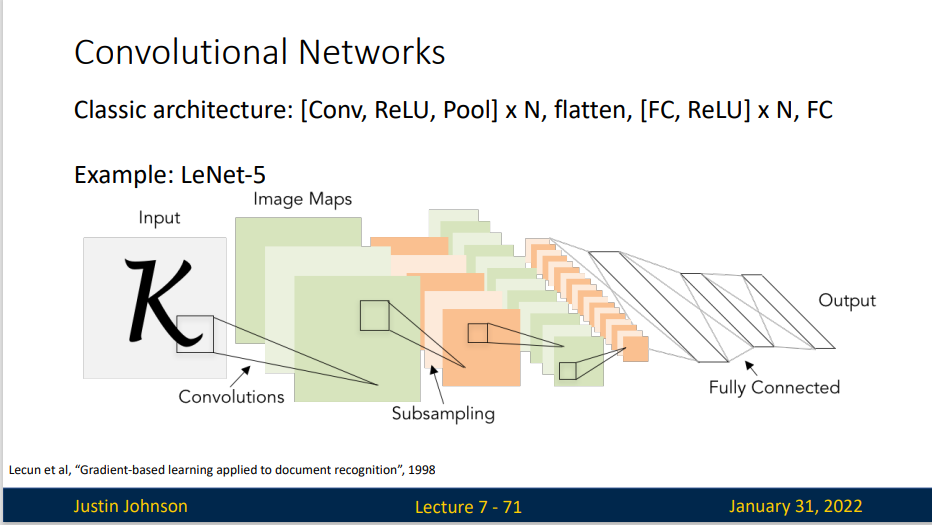
卷积神经网络最常见的形式就是将一些卷积层和ReLU层放在一起,其后紧跟汇聚层,然后重复如此直到图像在空间上被缩小到一个足够小的尺寸,在某个地方过渡成成全连接层也较为常见。最后的全连接层得到输出,比如分类评分等
As we go through the network: Spatial size decreases (using pooling or strided conv) Number of channels increases (total “volume” is preserved!) Some modern architectures break this trend -- stay tuned!