Linear System
约 1372 个字 2 张图片 预计阅读时间 9 分钟
Linear Systems
简单的线性控制系统可以为描述为:
其中 \(Bu\) 表示我们的控制。当不考虑控制影响时,即考虑 \(\dot{x} =Ax\) 对应解:
\(A\) 是一个矩阵,我们可以利用如下泰勒展开计算结果:
考虑一个如下坐标变换
其中 \(T\) 是矩阵 \(A\) 对应的特征向量构成的矩阵,满足 \(A = TDT^{-1}\) ,\(z\) 是特征向量方向上的坐标。
此时我们将原本动力学系统变换到了一个特殊 \(z\) 坐标系中,在这个坐标系中,系统的方程变成了一个简洁的对角形式,这也意味着各个分量之间相互解耦。带回到泰勒展开表达式:
所以
所以我们分解线性系统中的特征值和特征向量,在这些特征向量坐标中,动力学系统变得很简单
Stability
接下来讨论系统的稳定性,也就是当时间趋于无穷大时,系统会呈现出怎样的行为,这与 \(e^{Dt}\) ,注意这时候 \(D\) 是对角特征矩阵:
这些项中,即使其中只有一个趋向于无穷大也会导致 \(x\) 在某个方向趋向于无穷大,这并不是我们想要的事情。
考虑特征值 \(\lambda = a +\mathrm{i} b\) ,这里有点奇怪,因为我们在一个实值系统中考虑了复数,但是当我们考虑复数时,虚部总是以相反数的形式出现,即 \(\lambda = a\pm \mathrm{i} b\) ,从物理或数学的角度来说,当我们将混合项相加后,虚部会抵消,最终会得到实数的输出。
利用欧拉公式:
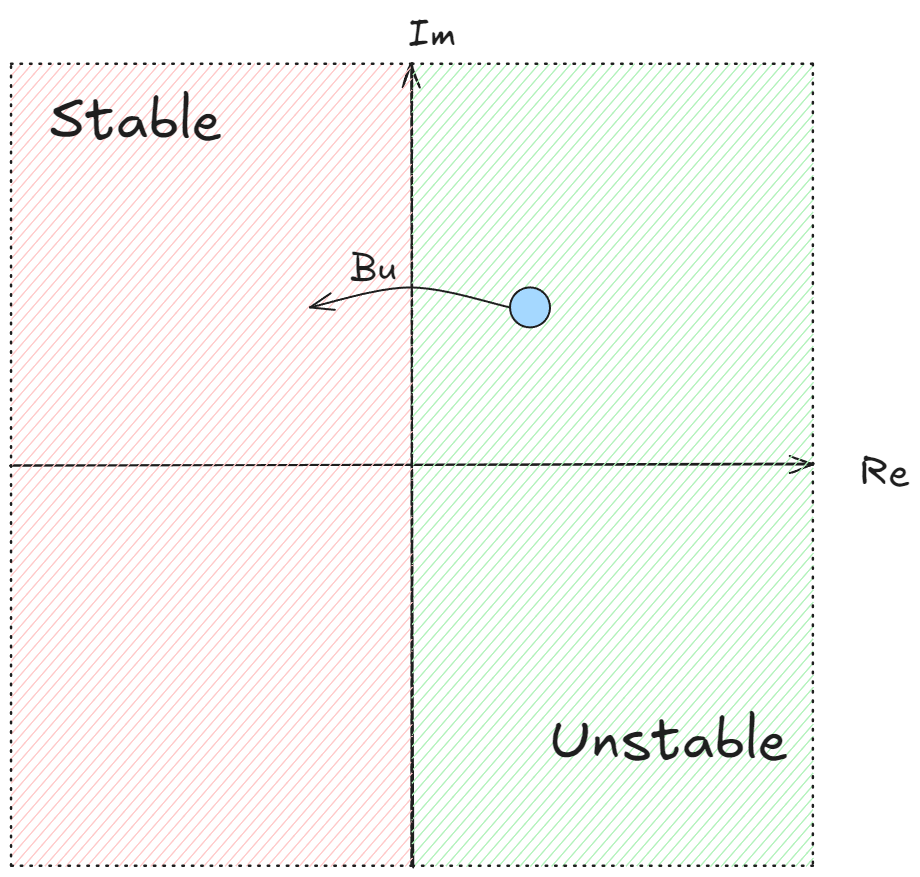
- 当 \(a > 0\) 系统以正弦波形式震荡,但是振幅以指数形式增大(指数增长的包络)
- 当 \(a < 0\) 系统以正弦波形式震荡,但是振幅以指数形式衰减(指数衰减的包络)
因此,当所有的特征值实部小于零时,系统是稳定的。在设计时,我们原本的线性系统的一部分特征值落在不稳定的区域,但是我们的驱动项 \(Bu\) 可以迫使其到达稳定区域
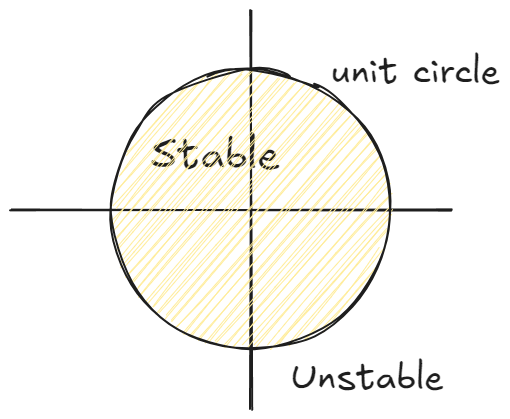
如果考虑一个离散系统
在离散时间中也存在稳定性的问题。我们将特征值以极坐标形式表示:\(\lambda = Re^{i\theta}\) 。对于第 N 时刻 \(x_{N}= \tilde{A}^{N}x_{0}\) ,对应的特征值为 \(\lambda^{N} = R^{N} e^{iN\theta}\) ,对应在复平面上半径要么增大要么减小,而角度发生不停的旋转。因此当半径大于 \(1\) 时,\(\lambda^{N}\) 会无穷增大,当半径小于 \(1\) 时, \(\lambda^{N}\) 会衰减到零。所以所有特征值必须位于单位圆内系统才能保持稳定。
Linearizing around a fixed point
考虑一个非线性系统:
可以通过以下步骤获得一个线性系统:
- 先找到固定点 \(f(\bar{x}) = 0\)
- 在 \(\bar{x}\) 附近进行线性化,即计算 \(\left .\frac{{\rm{D}} f }{{\rm {D}} x }\right\vert_{\bar{x}} =\left[ \frac{\partial f_{i} }{\partial x_{j} } \right]\)
利用泰勒展开可以知道,在非线性系统的固定点附近系统的表现近似线性:
如果我们的控制项 \(Bu\) 有效,我们能够使系统保持在该固定点附近,它能够稳定该系统并使其维持在固定点附近且表现良好。
但是线性化并不能总是准确描述非线性周围的动态特性。
动力系统在双曲平衡点(特征值有非零实部)附近的域中的行为与其在该平衡点附近的线性化行为近似相同。因此,在处理此类动力系统时,可以使用系统的更简单的线性化来分析其围绕平衡的行为
但如果特征值是纯虚数的话,线性化会失效。
Example
考虑一个简单的摆系统:
系统状态:
先寻找固定点
Jacobian 矩阵
将固定点带入:
可以求得在第二个固定点的 Jacobian 对应的特征值存在大于零的,换言之这是一个不稳定的定点,而 \([0,0]\) 是一个稳定的定点