Review of Active Vibration Isolation Strategies
约 687 个字 5 张图片 预计阅读时间 5 分钟
doi: 10.2174/2212797611104030212
说明
这篇文章是老师给的,因为我以后要做主动控制隔振(大概)。这篇文章精彩在大多数参考文献都是专利,而且写的非常简洁概要。
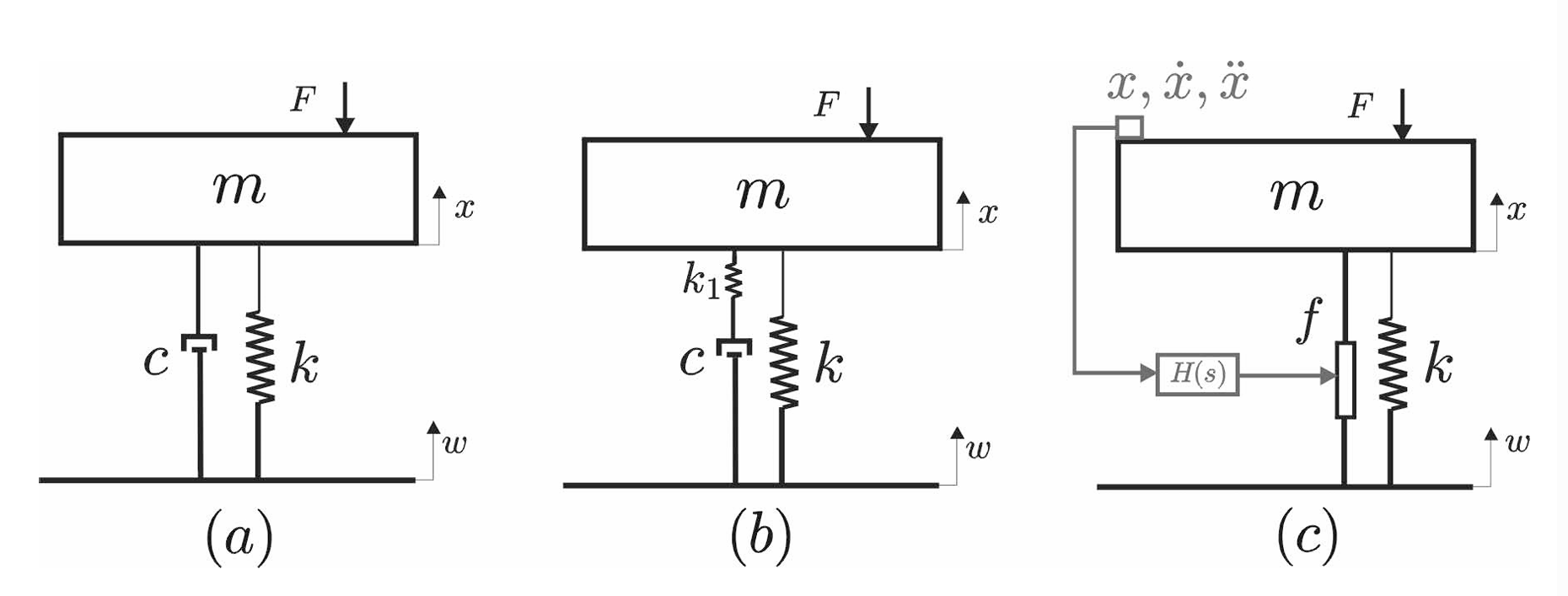
简单的动力学模型:
使用 Laplace 变换:
\(T_{wx}(s) = \frac{cs+k}{ms^{2}+cs+k}\) 称为 transmissibility ,\(T_{Fx}(s)= \frac{1}{ ms^{2}+cs + k}\) 称为 compliance
两个 tradeoff
-
第一个Tradeoff :通过增加粘性阻尼来降低共振频率的幅度,但是这会造成一个高频隔离效果的退化,这是一个阻尼和隔振效果之间需要达到的一个权衡(tradeoff)。一个有效的解决办法是在将粘性阻尼和一个弹簧并联,如图 \((b)\) 。
-
第二个 Tradeoff:但是随着共振频率的降低,在低频区域 compliance 增大,也就是说系统对于外力作用变得更加敏感。这是另一个隔振效果与外力的鲁棒性之间需要达到的权衡(tradeoff)
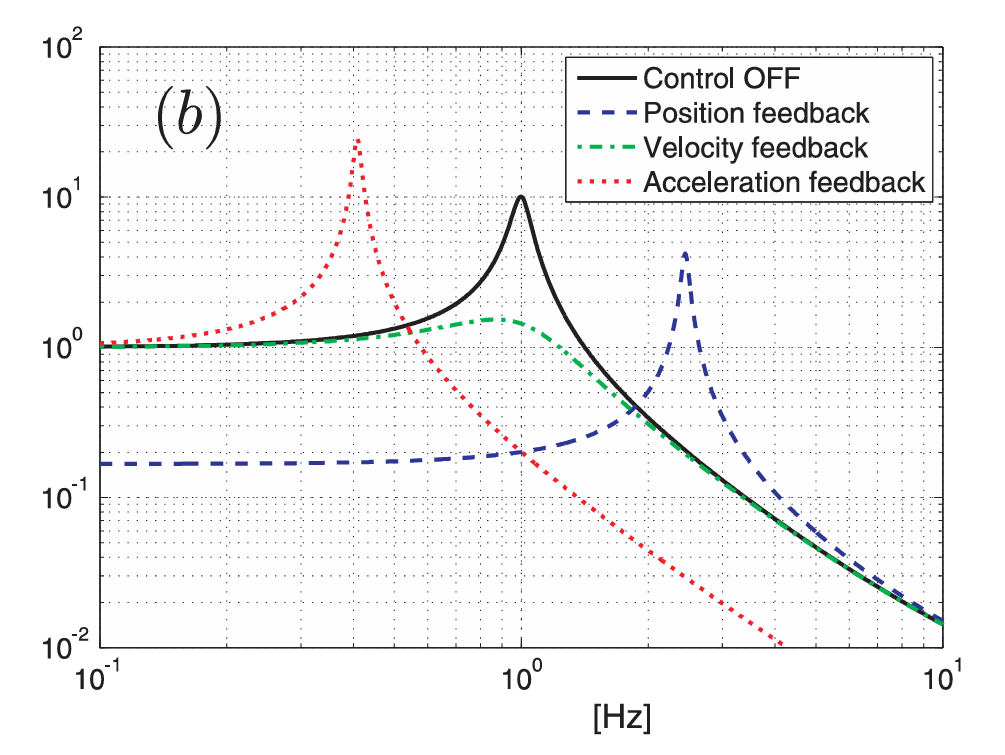
图 \(c\) 是一个简单的主动隔振器,与之前相比多了运动传感器,激励器 \(f\) 和控制单元(传递函数) \(H(s)\),激励器提供的力简单总结为:
- 加速度反馈:增加虚拟质量
- 速度反馈:sky-hook damper,降低共振时的幅度,但没有影响高频隔振效果 (对应第一个 Tradeoff)
- 位移反馈:sky-hook spring,低频隔振,增加刚性(对应第二个 Tradeoff)
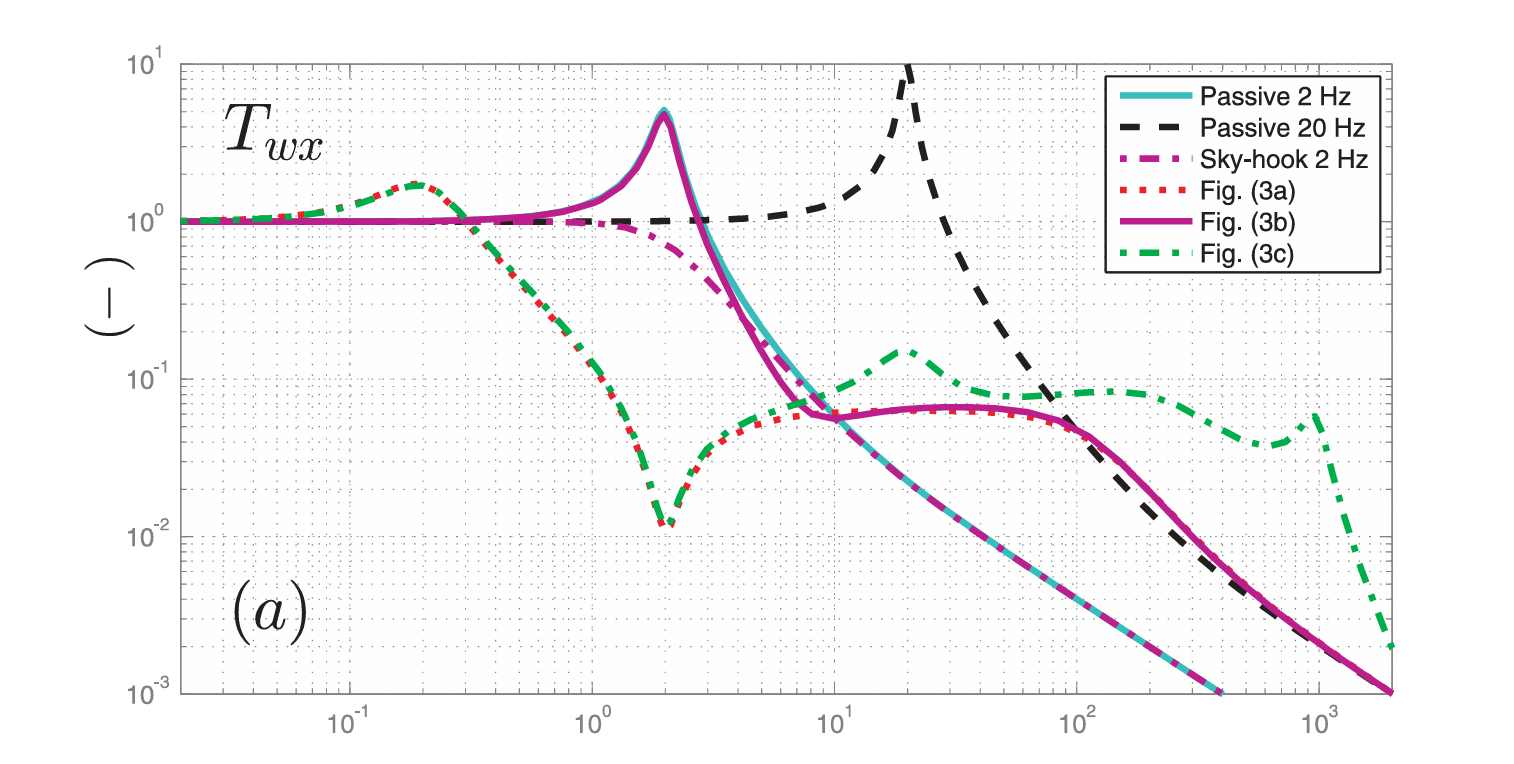
具体效果见下图:
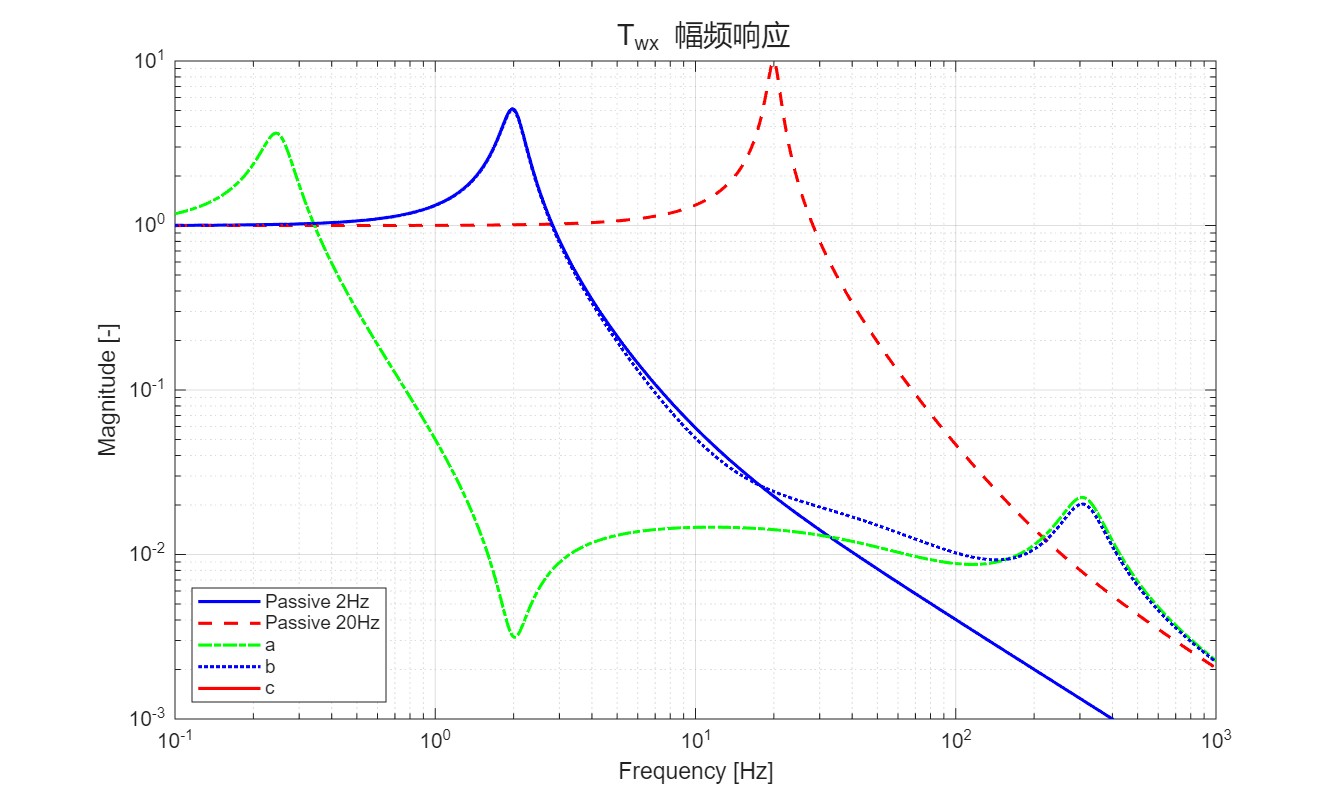
Problem:传感器只能测定相对位移,对于图 \((c)\) ,我们实际上测得的是 \(x-w,\dot{x}-\dot{w}\) ,也就是说我们并没有过多更改 \(T_{wx}\) 和 \(T_{Fx}\)。因此我们需要选取一些合适的惯性参考系,下面是三种参考系的选取方法
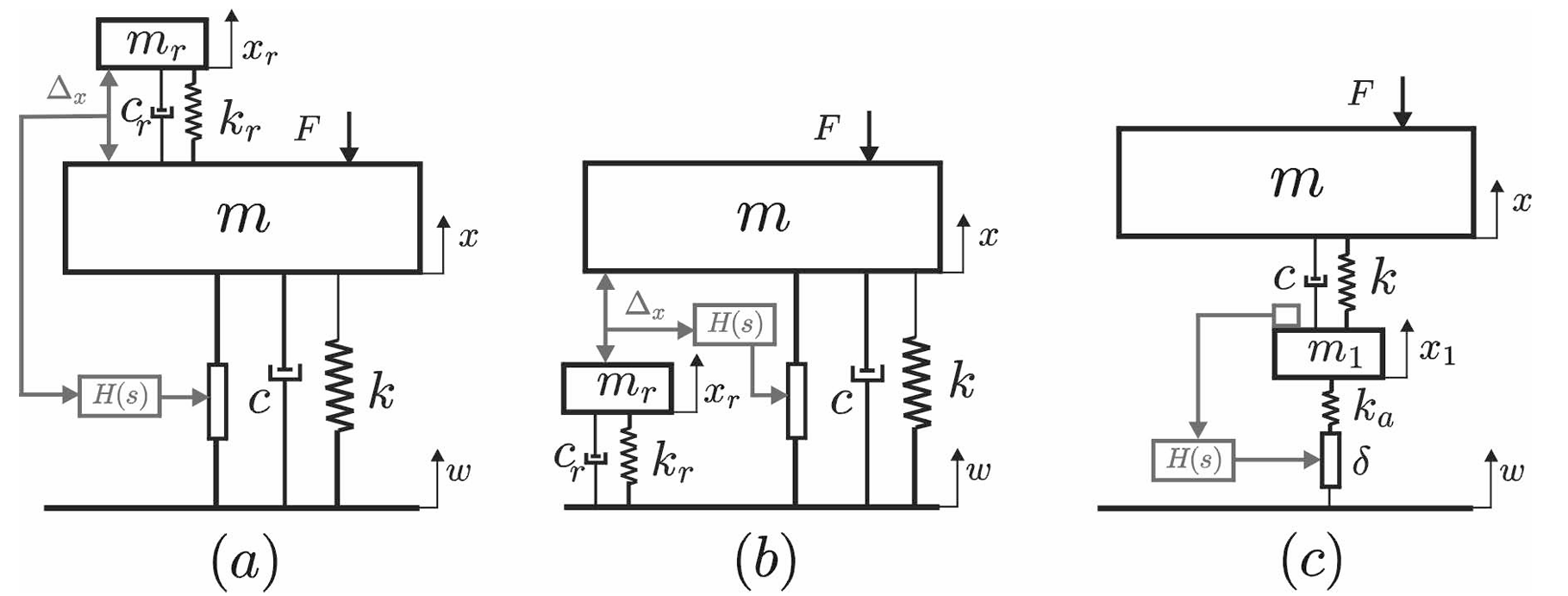
效果:
- 模型 \((a)\) 惯性参考点在设备上:高频稳定性,低频滞后降低 overshoot 。控制器共振出现零点
- 模型 \((b)\) 惯性参考点位于地面:高频稳定,在极低频对外力具有更强的鲁棒性(模型 \((a)\) 中无法处理低频外力),变体出现了更低的共振频率。
- 模型 \((c)\) 硬安装:整体刚度非常高,因此对外部干扰具有很强的鲁棒性。提高高频的隔振能力
(上面图片的实现涉及到了传递函数 \(H(s)\) 的选取,我所采用的是 PID 算法,能复现出总体趋势,但是效果没有很好,文章中给出了仿真时所用的传递函数特征)